


HOW TO FIND THE CENTROID OF A COMPOSITE AREA
(a composite area consists of several straight or curved lines.)
(i) Draw the figure in a coordinate system. Draw the dimensions too. Every dimensions will be measured with respect to origin of the coordinate system
(ii) Divide the composite area into several parts of basic geometric areas. Lebel them as part-1, part-2, part-3, .......part-n. Let the corresponding areas are A1, A2, A3, .... An. Let the centroids are G1(X1,Y1), G2(X2,Y2), G3(X3,Y3), ...... Gn(Xn,Yn).
(iii) Let the centroid of the composite area be G(Xg,Yg). Hence,
Xg = (A1X1 + A2X2 +A3X3)/(A1 + A2 + A3)
Yg = (A1Y1 + A2Y2 +A3Y3)/(A1 + A2 + A3)
(a composite area consists of several straight or curved lines.)
(i) Draw the figure in a coordinate system. Draw the dimensions too. Every dimensions will be measured with respect to origin of the coordinate system
(ii) Divide the composite area into several parts of basic geometric areas. Lebel them as part-1, part-2, part-3, .......part-n. Let the corresponding areas are A1, A2, A3, .... An. Let the centroids are G1(X1,Y1), G2(X2,Y2), G3(X3,Y3), ...... Gn(Xn,Yn).
(iii) Let the centroid of the composite area be G(Xg,Yg). Hence,
Xg = (A1X1 + A2X2 +A3X3)/(A1 + A2 + A3)
Yg = (A1Y1 + A2Y2 +A3Y3)/(A1 + A2 + A3)
(a) Suppose we have certain area of magnitude (A) in a coordinate system. The centroid of the area will be at its mid-point. A centroid is denoted by G.
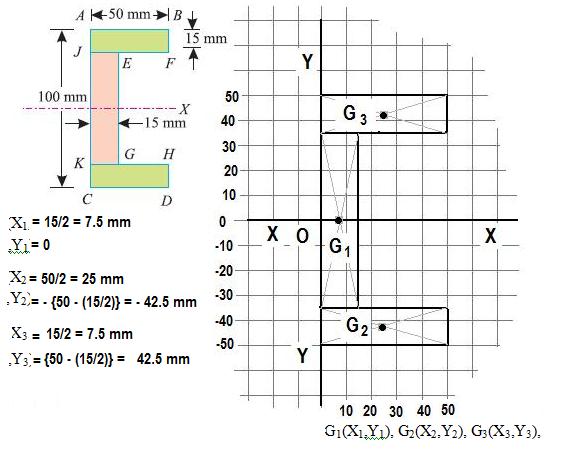
In the figure we have a complex geometrical area composed of three basic geometrical areas. Three rectangles. Let us denote the centroids as G1, G2, G3 for the given areas in the figure.
We shall have to find the Centroid of the entire area composed of A1, A2, A3.
At first, the composite line is divided into three parts.
In the figure we have a complex geometrical area composed of three basic geometrical areas. Three rectangles. Let us denote the centroids as G1, G2, G3 for the given areas in the figure.
We shall have to find the Centroid of the entire area composed of A1, A2, A3.
At first, the composite line is divided into three parts.
Part -1 : The middle rectangle : Let the centroid of the area A1 be G1(X1,Y1)
Area, A1 = (100-15-15)x15 mm² = 70x15 mm² = 1050 mm²
X1 = 7.5 mm
Y1 =0
Part -2 : The lower Rectangle : Let the centroid of the A2 be G2(X2,Y2)
Area, A2 = 50 x 15 mm² = 750 mm²
X2 = 25 mm
Y2 = - 42.5 mm
Part -3 : The upper Rectangle : Let the centroid of the area Area, A3 be G3(X3,Y3)
Area, A3 = 50 x 15 mm² = 750 mm²
X3 = 25 mm
Y3 = 42.5 mm
If the centroid of the composite line be G (Xg,Yg)
X1 = 7.5 mm
Y1 =0
Part -2 : The lower Rectangle : Let the centroid of the A2 be G2(X2,Y2)
Area, A2 = 50 x 15 mm² = 750 mm²
X2 = 25 mm
Y2 = - 42.5 mm
Part -3 : The upper Rectangle : Let the centroid of the area Area, A3 be G3(X3,Y3)
Area, A3 = 50 x 15 mm² = 750 mm²
X3 = 25 mm
Y3 = 42.5 mm
If the centroid of the composite line be G (Xg,Yg)
Xg = (∑AiXi)/(∑Ai)
= (A1X1 + A2X2 +A3X3)/(A1 + A2 + A3)
= (1050 x 7.5 + 750 x 25 + 750 x 25)/( 1050 + 750 + 750)
= 17.79 mm
Yg = (∑AiYi)/(∑Ai)
= (A1Y1 + A2Y2 +A3Y3)/(A1 + A2 + A3)
= {1050 x 0 + 750 x (-42.5) + 750 x 42.5}/( 1050 + 750 + 750)
= 0
As the figure is symmetrical about X axis, hence when we take the line of symmetry as our X axis (as we have taken here), we can directly write, Yg =0














.jpg)

{kind=link}